
自动化所在仿生机器海豚定深运动控制方面取得突破
近期,自动化所复杂系统管理与控制国家重点实验室的喻俊志研究员带领其团队提出了一种基于视线导航法和滑模观测器的滑模模糊(SMFC)控制算法,解决了一类鳍肢机动型机器海豚的定深控制问题,相关成果发表在自动化控制领域的顶级国际期刊IEEE Transaction on Industrial Electronics上。
团队首先分析机器海豚的定深控制机制,通过改变双侧鳍肢的偏转角来实现机器海豚的上浮/下潜;进一步忽略其偏航、横滚运动,简化动力学方程;其次,采用视线导航法将定深控制问题转化为俯仰角跟踪控制问题。考虑到机器海豚实现上浮/下潜必须有一定的前进速度提供俯仰力矩,采用滑模观测器来实时估计线性速度,结合视线法与滑模观测器来设计复合滑模控制器获取定深过程中的驱动力和偏转力矩。由于鳍状肢的偏转角与偏转力矩存在非线性关系,偏转力矩无法直接作用在机器海豚上,最后采用模糊控制策略,将驱动力、驱动力的变化率和偏转力矩、偏转力矩的变化率分别映射到机器海豚的腰、尾关节的拍动频率和鳍肢的偏转角上。在实验过程中,要求其维持在0.4 m的深度,定深过程的视频序列如图1所示。机器海豚在所提策略的控制下能够维持在目标深度,验证了该策略的有效性。
进一步与传统的PID控制器进行对比,两者的深度误差分别是0.18 cm(所提控制策略)和0.38 cm(PID控制器)。通过对比发现所提控制策略较传统的PID控制器具有更快的收敛速度和更好的稳定性。同时,该控制策略还应用到仿生机器海豚的平面路径跟踪上,取得了较为满意的跟踪效果。
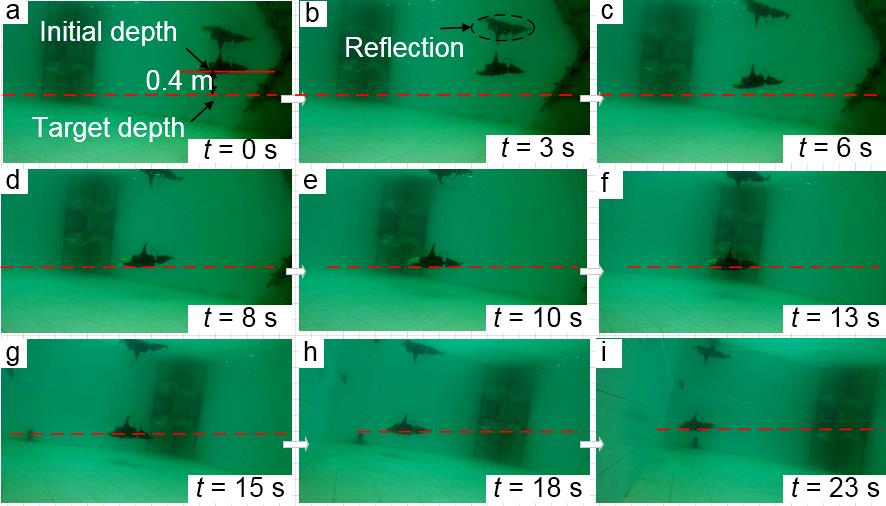
图1 定深实验视频序列
本文研究成果《Depth Control of a Bioinspired Robotic Dolphin Based on Sliding-Mode Fuzzy Control Method》发表IEEE Transaction on Industrial Electronics(vol. 65, no. 3, pp. 2429-2438. Mar. 2018)上。

